online retailer,bulk & wholesale and OEM/ODM e-shop of motor and controller, Shenzhen weigena technology co., LTD")




DC Turbo Worm Metal Gear Motor with 48CPR Hall Sensor Encoder 12V Low Speed 9RPM for Arduino Robot Control
About this product
*Product type: DC Gear motor with two-channel Hall effect encoder;
*Rated Voltage: 12V; No-Load Speed: 9RPM; No-Load Current: ≤ 0.31A;Rated Torque: 5.5kg.cm;
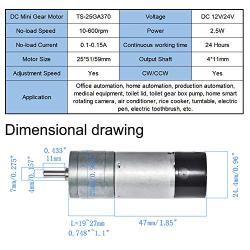
*Main Body Dimensions:93 x 32 x 27mm / 3.66" x 1.26" x 1.06 (L*W*H);Out Shaft Dimensions: 14 x 6mm / 0.55" x 0.23"(L*D) with 11 x 1.2mm / 0.43" x 0.047" flat cut off;
*Single Output 11400 Pulses Per Revolution: Gear Reduction Ratio: 1/950; Each Loop Output Pulses: 12PPR 950*12=11400PPR;
*Wiring Diagram:Red - Motor power terminal(+); Black - Motor power terminal(-); Green - Hall encoder Ground; Blue - Hall encoder +5V Vcc; Yellow - Hall encoder A signal; White - Hall encoder B signal.
Description
This is a Worm DC Gear motor with two-channel Quadrature Hall Encoder, Suit for Projects Such as Robotics,RC Car Model,Custom Servo, Arduino and 3D Printers,DIY Engine Toy.
The rear of the motor is equipped with a dual channel Holzer effect encoder, AB dual output, single circuit per cycle pulse 12PPR, double down the road, a total output of 48CPR. Phase difference 90 degrees.
The two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 48counts per revolution of the motor shaft.
To compute the counts per revolution of the gearbox output, multiply the gear ratio by 48.
Frequency Asked Questions
What is motormaker.net?
MotorMaker.net is an online retailer and bulk order e-shop for electric motor and controller products, range from standard products and customized products. Main production bases are located in Shenzhen, Dongguan, Wuhan, Shanghai and Chengdu. A professional team supports your order and customization design.
What service can be supported from motormaker.net?
MotorMaker.net offer product order and product customization service. All orders will be supported after-sales service, including quanlity gurantee, and technical support.
How to order products from motormaker.net?
You can online order product from motormaker.net by adding product to cart and got to checkout page. Multiple currency options are supported. You can choose suitable currency to place order. Before checkout, you should register account to submit order information.
How to delivery your order from motormaker.net to you?
For order delivery, motormaker.net provides three shipping options, express, air-flight and sea freight. You can choose one option according to your order.
How to inquiry product bulk price?
For the interested product, you can submit bulk price inquiry by bulk order inquiry form.
Related Products




Bemonoc Encoder Metal Gearmotor 12V DC High Speed 120RPM Gear Motor with Encoder for Robotics
MM2988