online retailer,bulk & wholesale and OEM/ODM e-shop of motor and controller, Shenzhen weigena technology co., LTD")
")
")
")
")
")
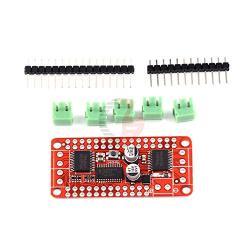
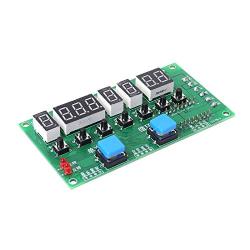
Taidacent 42 57 Stepper Motor Forward and Reverse Motor Driver Module Board Angle Pulse Motor Speed Drive Programmable PLC Speed Controller Motor Controller (Controller)
About this product
*Power supply range: DC 8V~ 24V universal
*Speed range: 0.1~999/min (the product comes with power-off memory function)
*Range of positive and negative pulses: 10~99990 pulses
*Delay adjustable time range: 0.1 second ~999 seconds
*Function selection setting range: P-1~P-6; Subdivision selection setting range: 1~128 subdivision
Description
Power supply range: DC 8V~ 24V universal
Speed ??range: 0.1~999/min (the product comes with power-off memory function)
Function introduction
P--1: Jog: Turn when the signal is given, and stop when the signal disappears.
P--2: Self-locking: turn when signal is given, stop when signal is given again.
P--3: Give forward signal, forward A distance stop; give reverse signal; Reverse B distance stop, where the forward and reverse angle can be set to be different.
P-4: Automatically stop when the signal is turned to A; after a delay of C time, it will automatically return.
P--5: Give the signal of forward rotation to automatically stop at a distance of forward rotation, after a delay of C time; to automatically stop at a distance of forward rotation again, the same as infinite loop reverse.
P--6: Automatically rotate forward for A distance after power-on, reverse for C seconds and stop for B distance and stop for C seconds, endless loop
42 Motor:
Rated current: 1.5A
Motor torque: 0.45N.m
Step angle: 1.8 degrees
Shaft diameter: 5mm,
Bearing: 23mm ,
Cable length: 1000mm
42 Motor size: 42*42*40mm (length, width and height)
42 Motor weight: 255g
57 Motor:
Rated current: 3A
Motor torque: 0.7N.m
Step angle: 1.8 degrees
Shaft diameter: 6.3mm with synchronous gear on top
Bearing: 15mm Cable length: 50mm
57 Motor size: 57*57*41.7mm (length, width and height)
57 Motor weight: 477g
The greater the torque, the heavier the weight that the motor can carry; the specific amount of weight it can drive is also related to the position of the object to the center of the shaft.
Frequency Asked Questions
What is motormaker.net?
MotorMaker.net is an online retailer and bulk order e-shop for electric motor and controller products, range from standard products and customized products. Main production bases are located in Shenzhen, Dongguan, Wuhan, Shanghai and Chengdu. A professional team supports your order and customization design.
What service can be supported from motormaker.net?
MotorMaker.net offer product order and product customization service. All orders will be supported after-sales service, including quanlity gurantee, and technical support.
How to order products from motormaker.net?
You can online order product from motormaker.net by adding product to cart and got to checkout page. Multiple currency options are supported. You can choose suitable currency to place order. Before checkout, you should register account to submit order information.
How to delivery your order from motormaker.net to you?
For order delivery, motormaker.net provides three shipping options, express, air-flight and sea freight. You can choose one option according to your order.
How to inquiry product bulk price?
For the interested product, you can submit bulk price inquiry by bulk order inquiry form.
Related Products






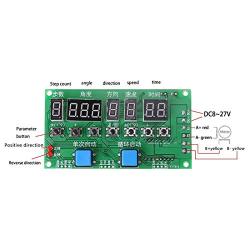
Stepper Motor Driver Controller Module Angle/Direction/Speed/Time Programmable Board DC 8-27V
MM27474