online retailer,bulk & wholesale and OEM/ODM e-shop of motor and controller, Shenzhen weigena technology co., LTD")



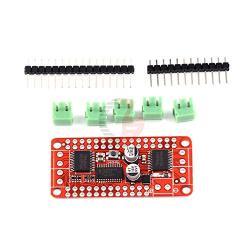
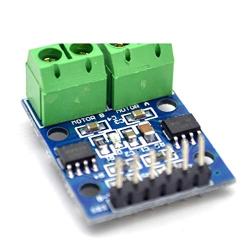
2.5V-12V 2CH L9110S H-Bridge Stepper Motor Driver Controller Board Dual Channel L9110 DC Motor Drive Control Module for Arduino
Availability: Pre-Order, Inquiry Price
About this product
*2.5V-12V 2CH L9110S H-bridge Stepper Motor Driver Controller Board Dual Channel L9110 DC Motor Drive Control Module for Arduino
*Developed country Estimated Delivery Time: 7-18 days by Special line. 10-30 days for other country..We provide Expedited Shipping service : 3-8 days.(excluding handling time).If the order amount above US $200, we will use Expedited Shipping service for free.
*2.5V-12V 2CH L9110S H-bridge Stepper Motor Driver Controller Board Dual Channel L9110 DC Motor Drive Control Module for Arduino
*Developed country Estimated Delivery Time: 7-18 days by Special line. 10-30 days for other country..We provide Expedited Shipping service : 3-8 days.(excluding handling time).If the order amount above US $200, we will use Expedited Shipping service for free.
*Date First Available : October 21, 2019
Description
Features:
onboard two the L9110S motor control chip
the module can simultaneously drive two DC motors or a 4-wire 2-phase stepper motor
the module input voltage :2.5-12V
the 800mA continuous current output capability per channel
Specifications:
1. Low static work current
2. Power supply voltage: DC2.5-12V
3. Each channel has 800mA continuous current output
4. Low saturation pressure drop
5. TTL/CMOS output level compatible, can be connected directly to the CPU
6. Output built-in clamping diode, apply to the perceptual load
7. Control and drive integrate in IC
8. Have pin high pressure protection function
9. Working temperature: 0-80 ?
10.Size:29.2(mm)x23(mm)
Package Included:
1 x Stepper Motor Driver Module
51 test code:
#include
sbit MOTOR_A_1 = P0 ^ 0;
sbit MOTOR_A_2 = P0 ^ 1;
sbit MOTOR_B_1 = P0 ^ 2;
sbit MOTOR_B_2 = P0 ^ 3;
void delay(unsigned long cnt)
{
while(cnt--);
}
void forward(void)
{
MOTOR_A_1 = 1;
MOTOR_A_2 = 0;
MOTOR_B_1 = 1;
MOTOR_B_2 = 0;
}
void backward(void)
{
MOTOR_A_1 = 0;
MOTOR_A_2 = 1;
MOTOR_B_1 = 0;
MOTOR_B_2 = 1;
}
void main(void)
{
EX0 = 1;
EX1 = 1;
EA = 1;
while(1)
{
forward();
delay(30000);
backward();
delay(30000);
}
}
Frequency Asked Questions
What is motormaker.net?
MotorMaker.net is an online retailer and bulk order e-shop for electric motor and controller products, range from standard products and customized products. Main production bases are located in Shenzhen, Dongguan, Wuhan, Shanghai and Chengdu. A professional team supports your order and customization design.
What service can be supported from motormaker.net?
MotorMaker.net offer product order and product customization service. All orders will be supported after-sales service, including quanlity gurantee, and technical support.
How to order products from motormaker.net?
You can online order product from motormaker.net by adding product to cart and got to checkout page. Multiple currency options are supported. You can choose suitable currency to place order. Before checkout, you should register account to submit order information.
How to delivery your order from motormaker.net to you?
For order delivery, motormaker.net provides three shipping options, express, air-flight and sea freight. You can choose one option according to your order.
How to inquiry product bulk price?
For the interested product, you can submit bulk price inquiry by bulk order inquiry form.
Related Products







1pcs L9110S H-Bridge Stepper Motor Dual DC Stepper Motor Driver Controller Board Module L9110S L9110
MM29189
L9110S H-Bridge Stepper Motor Dual DC Stepper Motor Driver Controller Board Module L9110S L9110
MM29210