online retailer,bulk & wholesale and OEM/ODM e-shop of motor and controller, Shenzhen weigena technology co., LTD")




MOTOBERRY Brushless Controller 48V 60V 64V 1000W Maximum Current 40A Aluminium Alloy for Electric Bicycle Scooter E-Scooter E-Bike
About this product
*[Stable Speed, Sensitive Control]: This brushless motor controller can provide stable speed, sensitive braking, reverse gear control [Good performance]: 12-tube controller, dual-mode square wave; stronger climbing power, low motor running sound, and low tire noise
*[Low failure rate]: The wire and interface are very durable, ensuring long-term use and low failure rate. Suitable for electric bicycles, electric scooters, etc.
*[Good performance]: 12-tube controller, dual-mode square wave; stronger climbing power, low motor running sound, and low tire noise
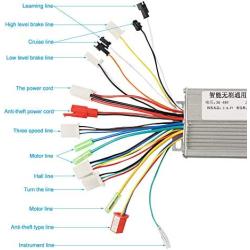
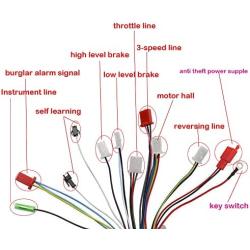
*[Complete functions]: power supply, electric door lock, motor phase line, accelerator line, third gear line, low brake line, high brake line, general instrument line, etc.
*[After-sale service]: If you have any questions or suggestions about this product, please feel free to contact us by email; we will definitely give you a satisfactory solution.
Description
48V-64V 1000W controller can work with hall sensor/hall sensorless
Rated Voltage: 48V-64V
Low Voltage : 41V±0.5V
Rated Power: 1000W
Limit Current: 40A
Transistor?18 tubes
48V-64V 1000W controller function?
1.LCD instrument line
2. 3-speed
3.cruise
4.self-learning
5.high brake
6.low brake
7.alarm power
8.alarm signal
9.reverse
10.throttle
11.hall
12.key lock? battery +?
13.battery +
14.battery -
15.motor
16.pointer meter line
how to connect controller?
1.connect the motor line (color to color?
2. connect the battery line(red:battery+ , black:battery-)
3. connect the controller throttle line, key lock?if throttle not have key lock, connect controller key lock to battery+?key lock must connect ?
4. connect the hall line(if motor without hall line, don’t need connect)
5.docking the two self-learning lines, the wheel will forward or reverse.
(1.if wheel forward ,Separate the self-learning line.
2.if wheel reverse, Separate the self-learning line. Docking the self-learning line again.if wheel forward ,Separate the self-learning line.)
6.other functions can be connected as needed.
Frequency Asked Questions
What is motormaker.net?
MotorMaker.net is an online retailer and bulk order e-shop for electric motor and controller products, range from standard products and customized products. Main production bases are located in Shenzhen, Dongguan, Wuhan, Shanghai and Chengdu. A professional team supports your order and customization design.
What service can be supported from motormaker.net?
MotorMaker.net offer product order and product customization service. All orders will be supported after-sales service, including quanlity gurantee, and technical support.
How to order products from motormaker.net?
You can online order product from motormaker.net by adding product to cart and got to checkout page. Multiple currency options are supported. You can choose suitable currency to place order. Before checkout, you should register account to submit order information.
How to delivery your order from motormaker.net to you?
For order delivery, motormaker.net provides three shipping options, express, air-flight and sea freight. You can choose one option according to your order.
How to inquiry product bulk price?
For the interested product, you can submit bulk price inquiry by bulk order inquiry form.
Related Products